





Research Equipment
Custom multi-sensor platforms



At MPL we have designed our own custom setups for our research on multi-sensor fusion. We have a compact hand-held system which is equipped with one stereo camera, one stereo event camera, an Xsens IMU, an RGB-D camera, and a Lidar. The system is fully calibrated and synchronized, and is used in various modes: hand-held, mounted on helmet, and mounted on planar moving platform. The captured datasets enable us to compare all sorts of SLAM algorithms against each other, and support our ongoing research on HD map based event camera localization and tracking. Another platform we keep maintaining is given by a fully calibrated and synchronized surround-view multi-camera system mounted on a passenger vehicle. This platform supports our continued efforts on vision-based autonomy for self-driving cars.
Event cameras



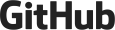
Our event camera research is supported by four different hardware platforms. We use the most recent Prophesee Gen4, Prophesee Gen3 powered SilkyEvCam by Japanese manufacturer CenturyArks, Inivation's Davis364 which comes with both events and regular images, and CeleX5 by Celepixel, one of the first 1MP event cameras on the market.
Ground truth capture devices



In order to support our research on Simultaneous Localization And Mapping, it is important to have reliable ground truth capturing devices to provide a basis for comparing results. We use a variety of tools for capturing ground truth. The first is given by an Optitrack system with 12 Prime 17W cameras. This system provides accurate ground truth pose information in an area of approximately 30 square meters. In order to collect ground truth pose information in larger scale experiments in which the platform traverses entire buildings or large-scale outdoor areas, we use a Leika Total Station with the ability to track positions with less than 1cm error over distances of 1km. In order to furthermore obtain groundtruth information about the structure of the environment, we use a Faro Focus Scanner. In its highest precision setting, it will take 20 minutes for one scan but return highly dense and highly precise full 3D point clouds.
High-speed vision

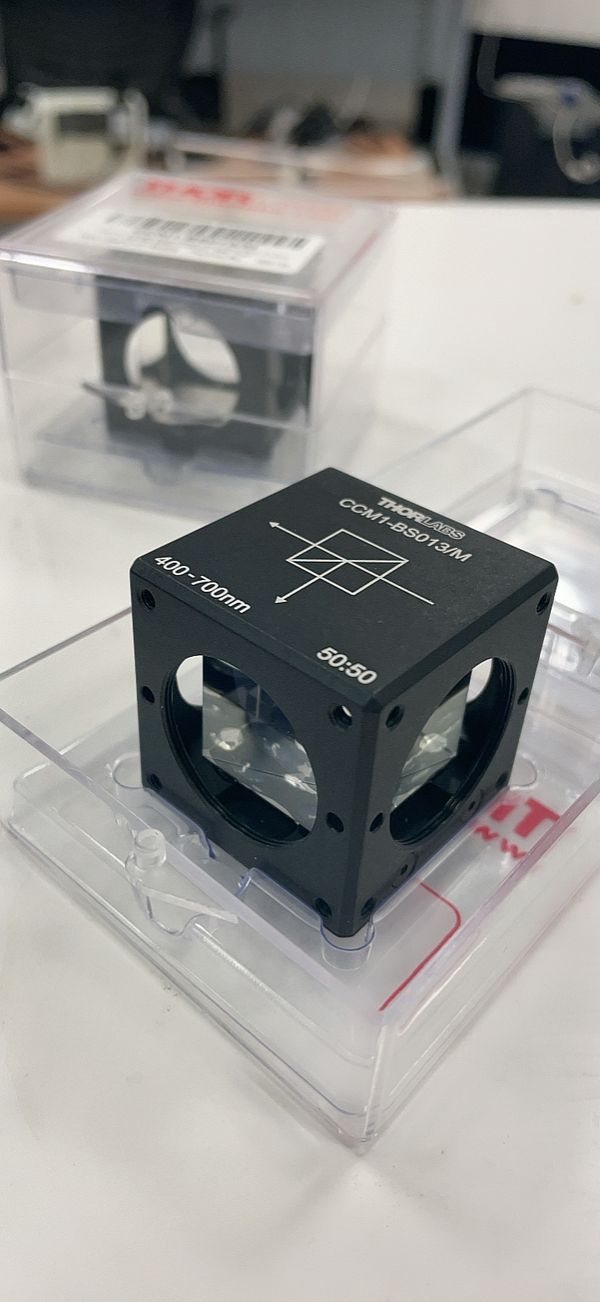
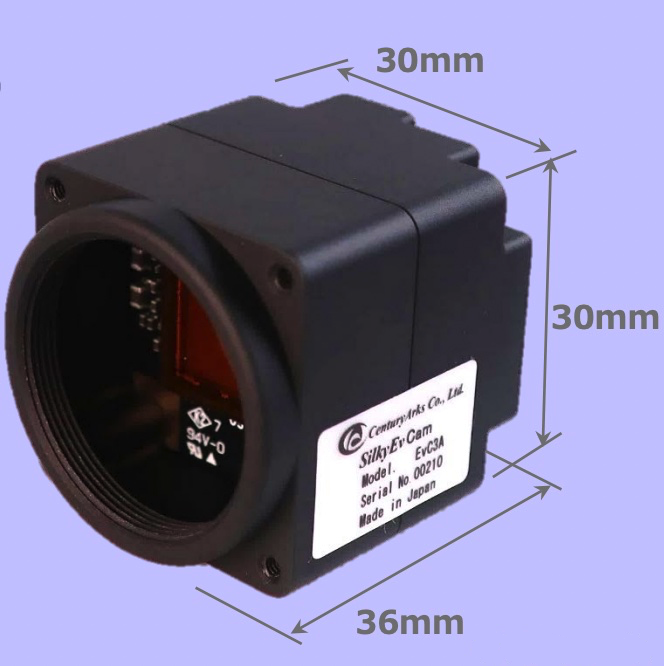
In order to support our research on high-speed vision, we have recently acquired 2 NEC MEMRECAM ACS1 ultra high-speed cameras which are able to capture the world at up to 70'000 frames per second. The cameras can be synchronized and furthermore connected to our beam-splitters such that they can be virtually placed in the same center than other cameras (e.g. event cameras).