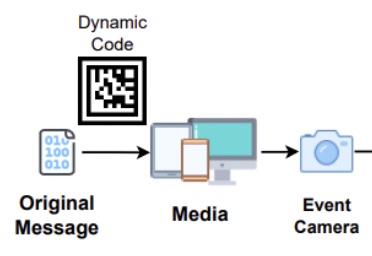
 | H. Su, L. Gao, T. Liu, and L. Kneip. Motion-aware optical camera communication with event
cameras. Robotics and Automation Letters (RAL), 10(2):1385–1392, 2025b |
| | H. Su, L. Gao, T. Liu, and L. Kneip. Motion-aware optical camera communication with event
cameras. Robotics and Automation Letters (RAL), 10(2):1385–1392, 2025b |
 | J. Cui, J. Zhang, L. Kneip, and S. Schwertfeger. Neural surfel reconstruction: Addressing loop
closure challenges in large-scale 3d neural scene mapping. Sensors, 24(21), 2024a [pdf] |
 | Z. Liu, B. Guan, Y. Shang, Q. Yu, and L. Kneip. Line-based 6-DoF Object Pose Estimation and
Tracking With an Event Camera. IEEE Transactions on Image Processing (TIP), 33:4765–4780, 2024
|
 | Y Zuo, W Xu, X Wang, Y Wang, and L Kneip. Cross-Modal Semi-Dense 6-DoF Tracking of an
Event Camera in Challenging Conditions. IEEE Transactions on Robotics (T-RO), 40:1600–1616,
2024 [pdf(arxiv)] [code] |
 | W Xu, X Peng, and L Kneip. Tight Fusion of Events and Inertial Measurements for Direct Velocity
Estimation. IEEE Transactions on Robotics (T-RO), 40:240–256, 2023 |
 | L Gao, Y Liang, J Yang, S Wu, C Wang, J Chen, and L Kneip. VECtor: A Versatile
Event-Centric Benchmark for Multi-Sensor SLAM. Robotics and Automation Letters (RAL), 7(3):
8217–8224, 2022b [pdf(arxiv)] [supplementary] [dataset] [video(youtube)] [video(bilibili)] |
 | Q Xu, H Kuang, L Kneip, and S Schwertfeger. Rethinking the Fourier-Mellin Transform: Multiple
Depths in the Camera’s View. Remote Sensing, 2021 [pdf] |
 | X Peng, L Gao, Y Wang, and L Kneip. Globally-Optimal Contrast Maximisation for Event
Cameras. IEEE Transactions on Pattern Analysis and Machine Intelligence (PAMI), 44:3479–3495,
2021a |
 | L Hu and L Kneip. Globally optimal point set registration by joint symmetry plane fitting. Journal
of Mathematical Imaging and Vision (JMIV), 63:689–707, February 2021. Open-access |
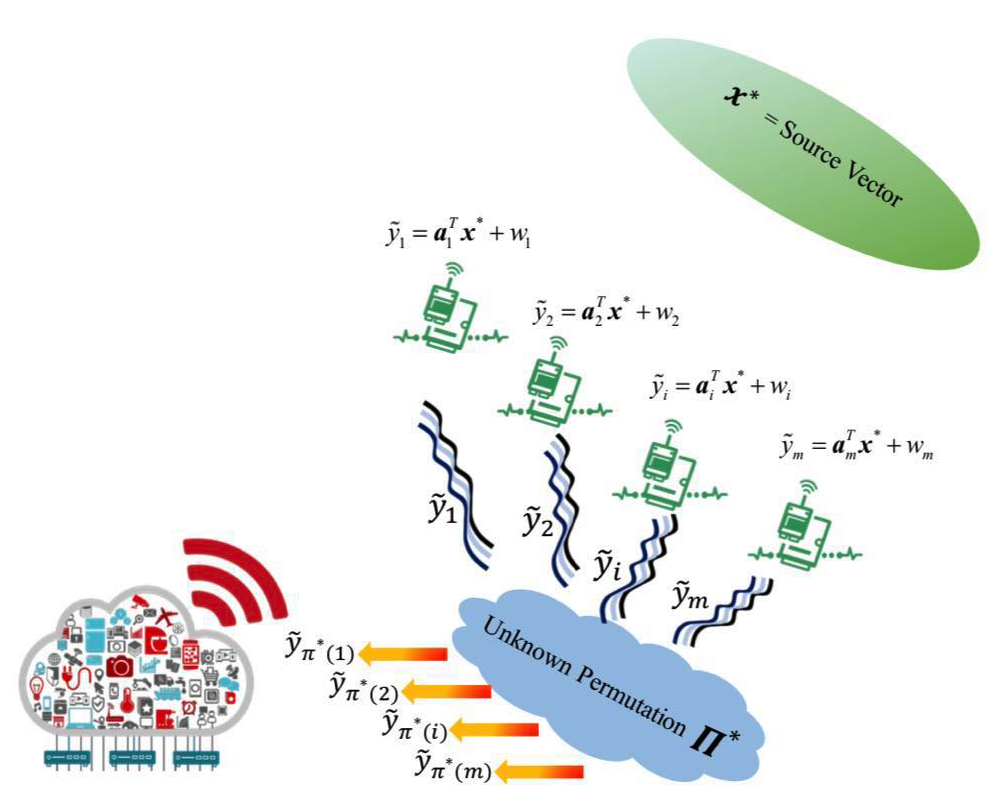
 | M C Tsakiris, L Peng, A Conca, L Kneip, Y Shi, and H Choi. An algebraic-geometric approach
for linear regression without correspondences. IEEE Transactions on Information Theory, 66:
5130–5144, 2020 |
 | Y Cao, L Hu, and L Kneip. Representations and benchmarking of modern visual slam systems.
MDPI Sensors, 20:2572, 2020 |
 | P Yu, C Wang, Z Wang, J Yu, and L Kneip. Accurate line-based relative pose estimation with
camera matrices. IEEE Access, 8:88294–88307, 2020. Open access [pdf] |
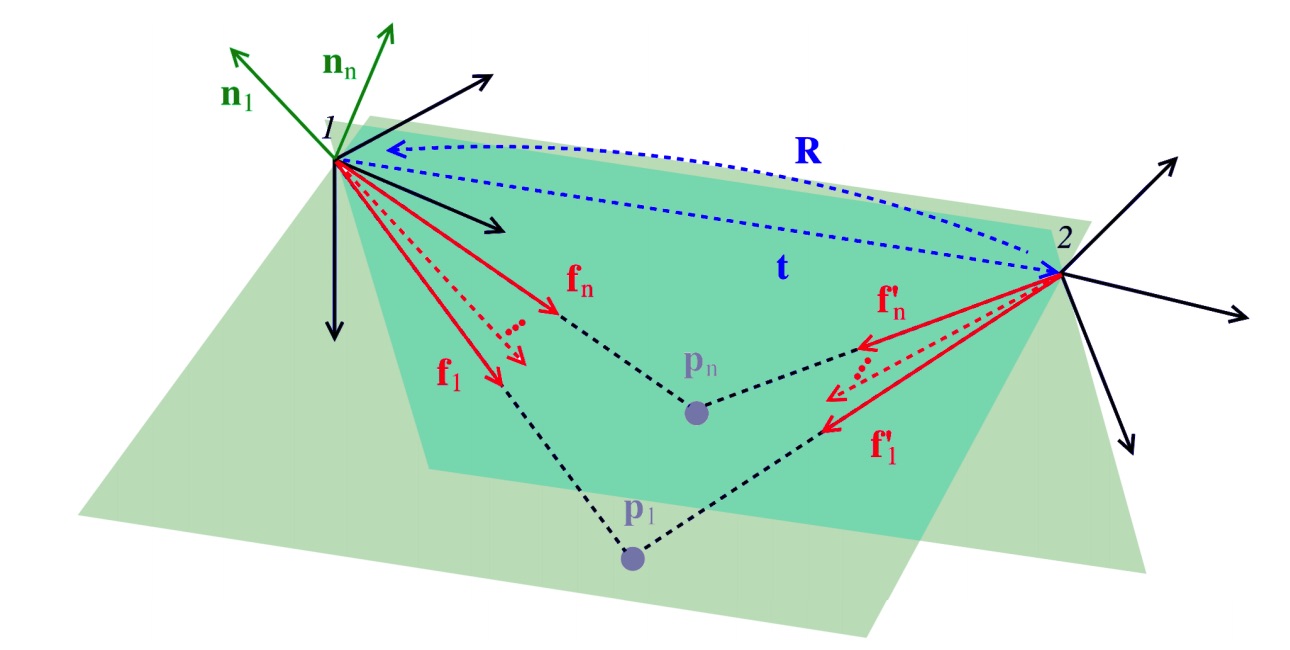
 | J Zhao, L Kneip, Y He, and J Ma. Minimal case relative pose computation using ray-point-ray
features. IEEE Transactions on Pattern Analysis and Machine Intelligence (PAMI), 42:1176–1190,
2020a |
 | Y Zhou, H Li, and L Kneip. Canny-VO: Visual Odometry with RGB-D Cameras based on
Geometric 3D-2D Edge Alignment. IEEE Transactions on Robotics (T-RO), 35(1):1–16, 2019 |
 | J. Zhao, B. Guan, Z. Liu, and L. Kneip. Full-dof egomotion estimation for event cameras
using geometric solvers. In Proceedings of the IEEE Conference on Computer Vision and Pattern
Recognition (CVPR), 2025. Accepted for publication [pdf] |
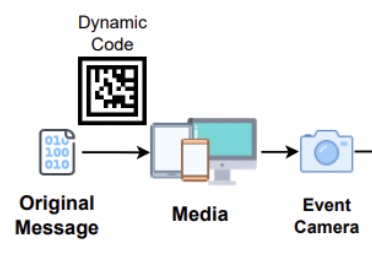 | H. Su, L. Gao, T. Liu, and L. Kneip. Motion-aware optical camera communication with event
cameras. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA),
2025a |
 | J. Yu, X. Peng, Z. Lu, L. Kneip, and Y. Wang. SpikeGS: Learning 3D Gaussian Fields from
Continuous Spike Stream. In Proceedings of the Asian Conference on Computer Vision (ACCV),
2024 |
 | J Zhao, B Guan, and L Kneip. Six-point method for multi-camera systems with reduced solution
space. In Proceedings of the European Conference on Computer Vision (ECCV), 2024 [pdf] |
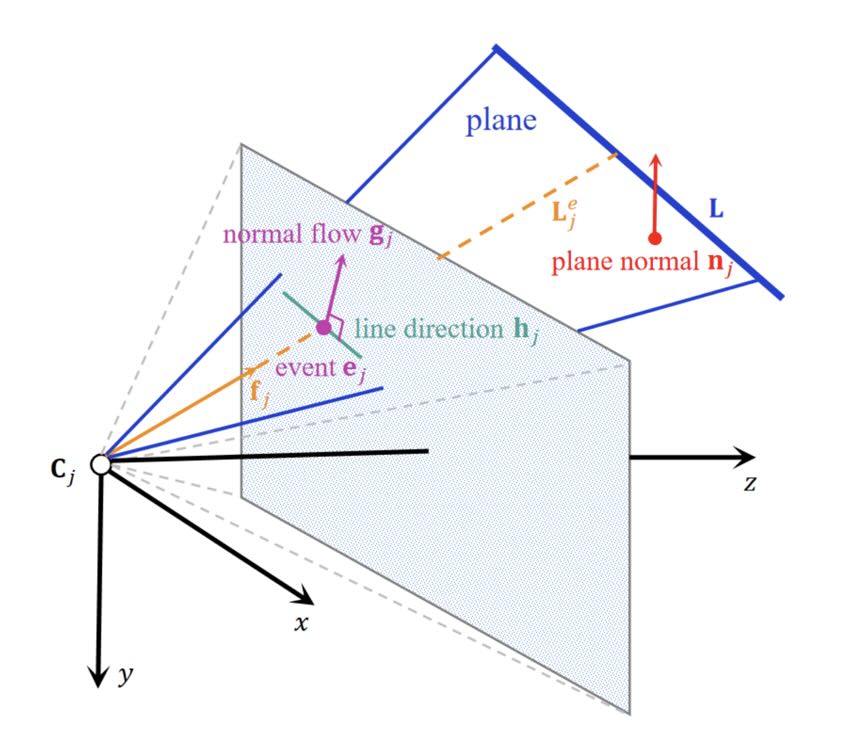
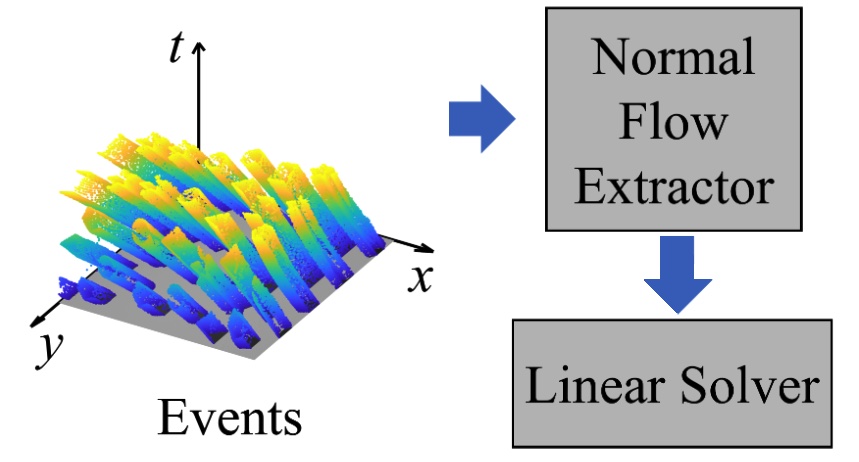 | Z Ren, B Liao, D Kong, J Li, P Liu, L Kneip, G Gallego, and Y Zhou. Motion and structure
from event-based normal flow. In Proceedings of the European Conference on Computer Vision
(ECCV), 2024 [pdf] |
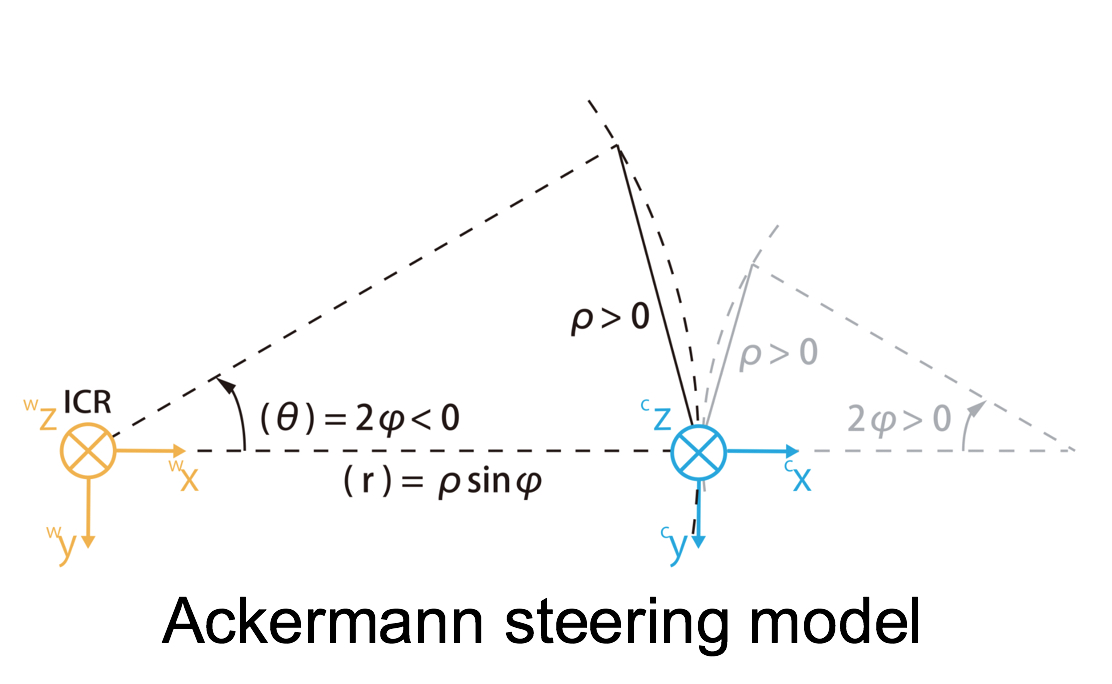
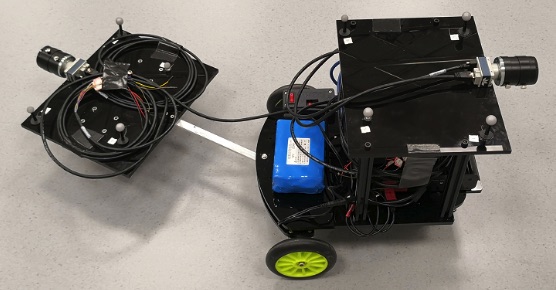
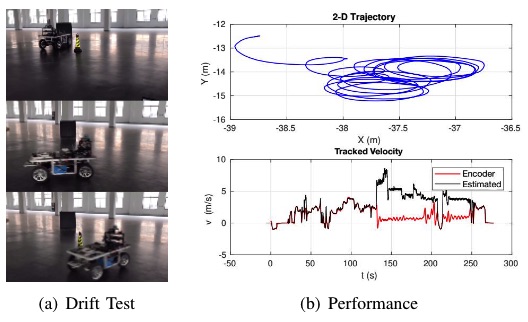
 | W. Xu, S. Zhang, L. Cui, X. Peng, and L. Kneip. Event-based visual odometry on non-holonomic
ground vehicles. In Proceedings of the International Conference on 3D Vision (3DV), 2024 [pdf(arxiv)] [code] [video] |
 | M. Li, J. Yang, and L. Kneip. Relative pose for nonrigid multi-perspective cameras: The static
case. In Proceedings of the International Conference on 3D Vision (3DV), 2024. Oral presentation |
 | L Gao, H Su, D Gehrig, M Cannici, D Scaramuzza, and L Kneip. A 5-Point Minimal Solver
for Event Camera Relative Motion Estimation. In Proceedings of the International Conference on
Computer Vision (ICCV), 2023. Oral Presentation [pdf(arxiv)] [video] [webpage] [poster] |
 | R Yuan, R Cheng, L Liu, T Sun, and L Kneip. Scale jump-aware pose graph relaxation for
monocular SLAM with re-initializations. In Proceedings of the IEEE/RSJ Conference on Intelligent
Robots and Systems (IROS), 2023 [pdf(arxiv)] [video] [code] |
 | J Wei, L Hu, C Wang, and L Kneip. Accurate Instance-Level CAD Model Retrieval in a
Large-Scale Database. In Proceedings of the IEEE/RSJ Conference on Intelligent Robots and Systems
(IROS), 2022a [pdf(arxiv)] [video1(youtube)] [video2(youtube)] [video(bilibili)] |
 | L Gao, Y Liang, J Yang, S Wu, C Wang, J Chen, and L Kneip. VECtor: A Versatile
Event-Centric Benchmark for Multi-Sensor SLAM. In Proceedings of the IEEE/RSJ Conference on
Intelligent Robots and Systems (IROS), 2022a [pdf(arxiv)] [supplementary] [dataset] [video(youtube)] [video(bilibili)] |
 | Y Zuo, J Yang, J Chen, X Wang, Y Wang, and L Kneip. DEVO: Depth-Event Camera Visual
Odometry in Challenging Conditions. In Proceedings of the IEEE International Conference on
Robotics and Automation (ICRA), 2022 [pdf(arxiv)] [video1(youtube)] [video2(youtube)] [video(bilibili)] |
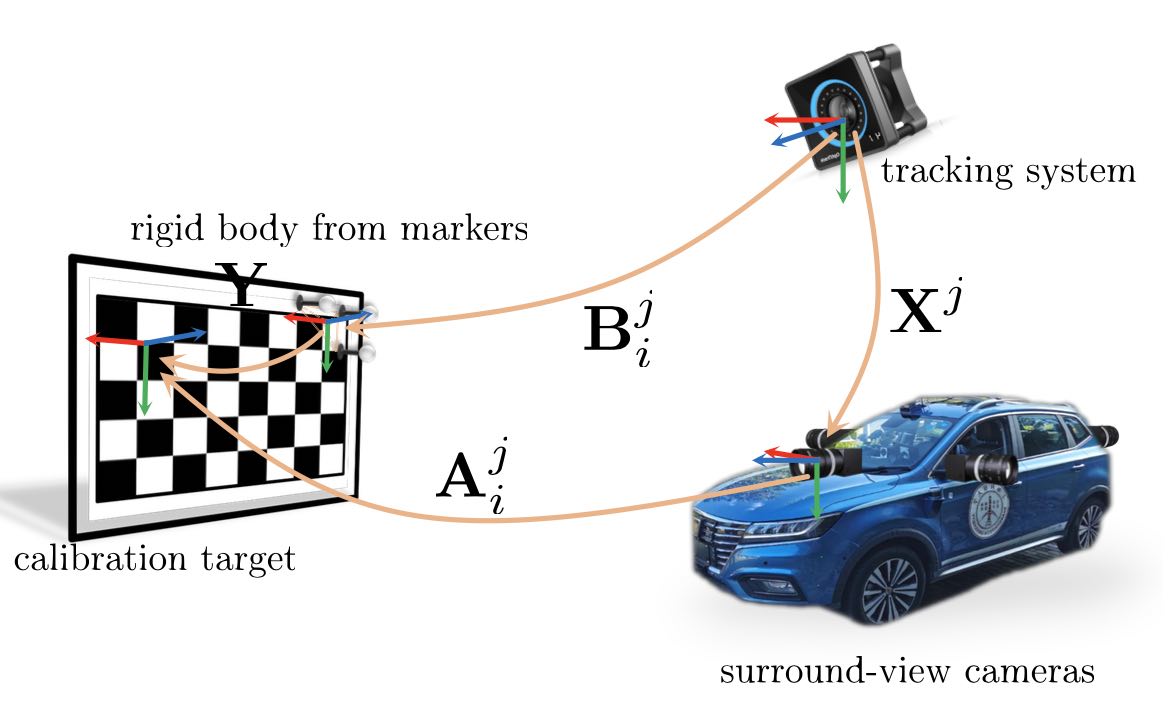 | Y Wang, W Jiang, K Huang, S Schwertfeger, and L Kneip. Accurate calibration of
multi-perspective cameras from a generalization of the hand-eye constraint. In Proceedings of the
IEEE International Conference on Robotics and Automation (ICRA), 2022a [pdf(arxiv)] [video1(youtube)] [video2(youtube)] [video(bilibili)] [code] |
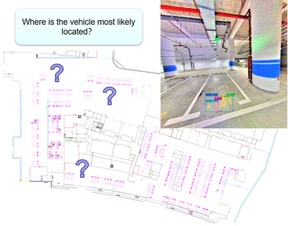
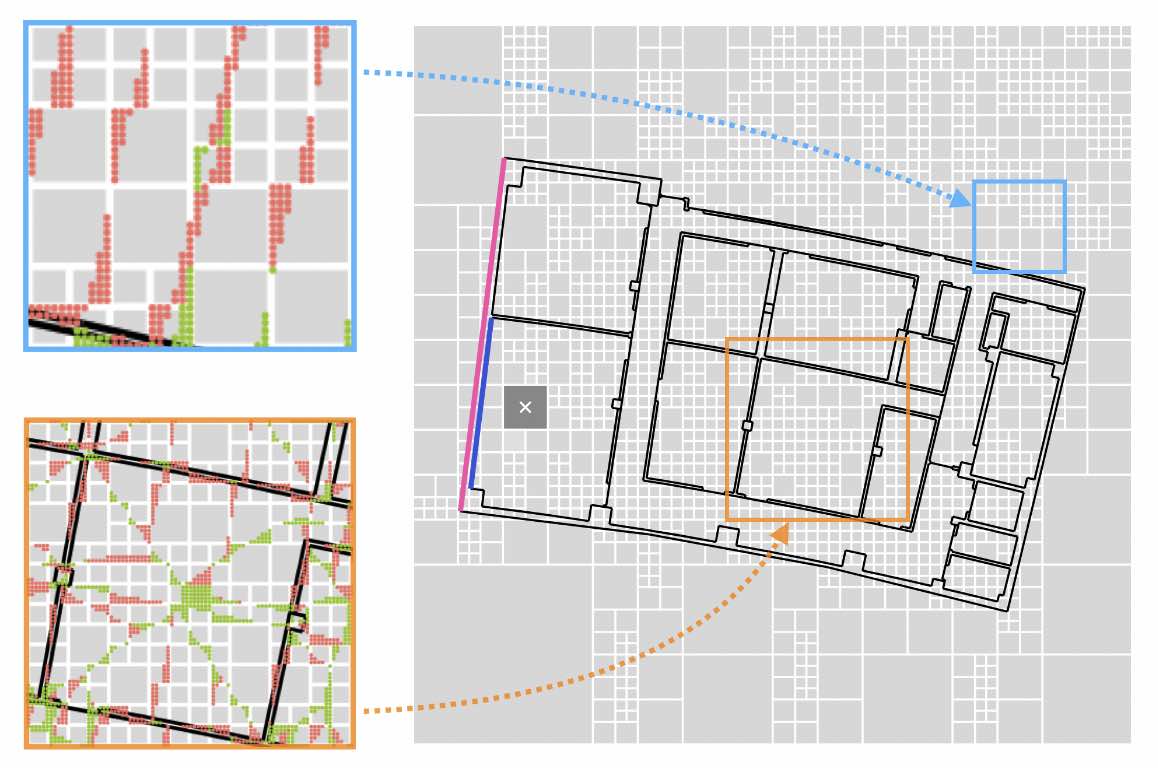 | L Gao and L Kneip. FP-Loc: Lightweight and Drift-free Floor Plan-assisted LiDAR Localization.
In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), 2022 [pdf(arxiv)] [video1(youtube)] [video2(youtube)] [video(bilibili)] |
 | K Li, Z Ouyang, L Hu, D Hao, and L Kneip. Robust SRIF-based LiDAR-IMU Localization
for Autonomous Vehicles. In Proceedings of the IEEE International Conference on Robotics and
Automation (ICRA), 2021 |
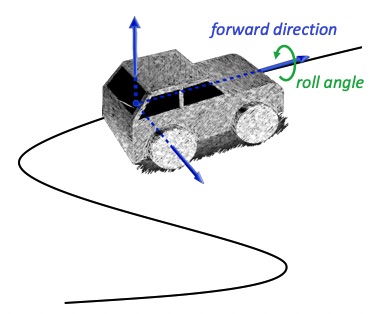 | K Huang, Y Wang, and L Kneip. B-splines for Purely Vision-based Localization and Mapping on
Non-holonomic Ground Vehicles. In Proceedings of the IEEE International Conference on Robotics
and Automation (ICRA), 2021a [pdf] [video(youtube)] [video(bilibili)] |
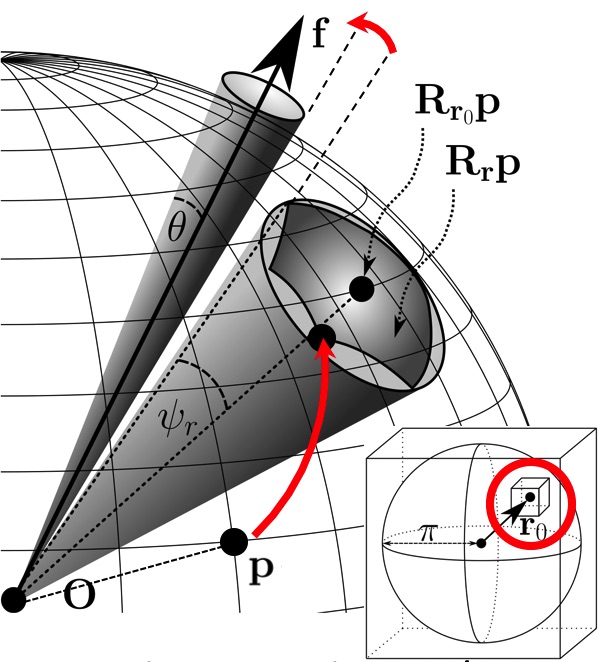
 | Y Chen, J Zhao, and L Kneip. Hybrid Rotation Averaging: A Fast and Robust Rotation Averaging
Approach. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition
(CVPR), 2021 [pdf] |
 | K Huang, Y Wang, and L Kneip. Dynamic Event Camera Calibration. In Proceedings of the
IEEE/RSJ Conference on Intelligent Robots and Systems (IROS), 2021b [pdf(arxiv)] [video(youtube)] [video(bilibili)] [code] |
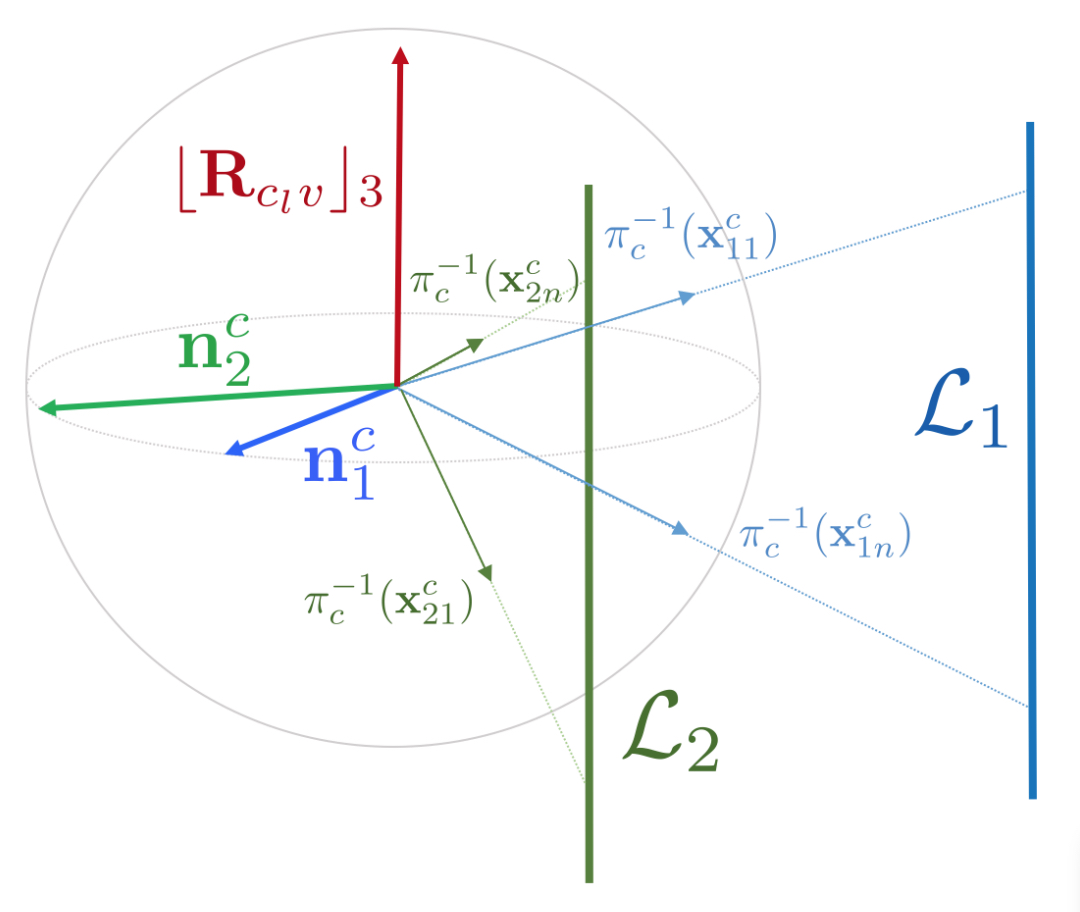
 | X Peng, W Xu, J Yang, and L Kneip. Continuous Event-Line Constraint for Closed-Form Velocity
Initialization. In Proceedings of the British Machine Vision Conference (BMVC), 2021b |
 | X Peng, Y Wang, L Gao, and L Kneip. Globally-optimal event camera motion estimation. In
Proceedings of the European Conference on Computer Vision (ECCV), Glasgow, UK, August 2020 [pdf] [video(youtube)] [video(bilibili)] |
 | T Ding, Y Yang, Z Zhu, D Robinson, R Vidal, L Kneip, and M Tsakiris. Robust homography
estimation via dual principal component pursuit. In Proceedings of the IEEE Conference on Computer
Vision and Pattern Recognition (CVPR), Seattle, USA, June 2020 [pdf] |
 | J Zhao, W Xu, and L Kneip. A certifiably globally optimal solution to generalized essential matrix
estimation. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition
(CVPR), Seattle, USA, June 2020b [pdf] [video(youtube)] [video(bilibili)] |
 | Y Wang, K Huang, X Peng, H Li, and L Kneip. Reliable frame-to-frame motion estimation for
vehicle-mounted surround-view camera systems. In Proceedings of the IEEE International Conference
on Robotics and Automation (ICRA), Paris, France, May 2020 [pdf] [video(youtube)] [video(bilibili)] |
 | K Huang, Y Wang, and L Kneip. Motion estimation of non-holonomic ground vehicles from a
single feature correspondence measured over n views. In Proceedings of the IEEE Conference on
Computer Vision and Pattern Recognition (CVPR), Long Beach, USA, June 2019 [pdf] [video(youtube)] [video(bilibili)] |
 | D Campbell, L Petersson, L Kneip, H Li, and S Gould. The alignment of the spheres:
Globally-optimal spherical mixture alignment for camera pose estimation. In Proceedings of the IEEE
Conference on Computer Vision and Pattern Recognition (CVPR), Long Beach, USA, June 2019 [pdf] |
 | L Peng, X Song, M C Tsakiris, H Choi, L Kneip, and Y Shi. Algebraically-initialized expectation
maximization for header-free communication. In Proceedings of the IEEE International Conference
on Accoustics, Speech and Signal Processing (ICASSP), Brighton, UK, May 2019a [poster] |
 | J Briales, L Kneip, and J Gonzalez-Jimenez. A Certifiably Globally Optimal Solution to the
Non-Minimal Relative Pose Problem. In Proceedings of the IEEE Conference on Computer Vision
and Pattern Recognition (CVPR), Salt Lake City, June 2018. Oral presentation [pdf] |
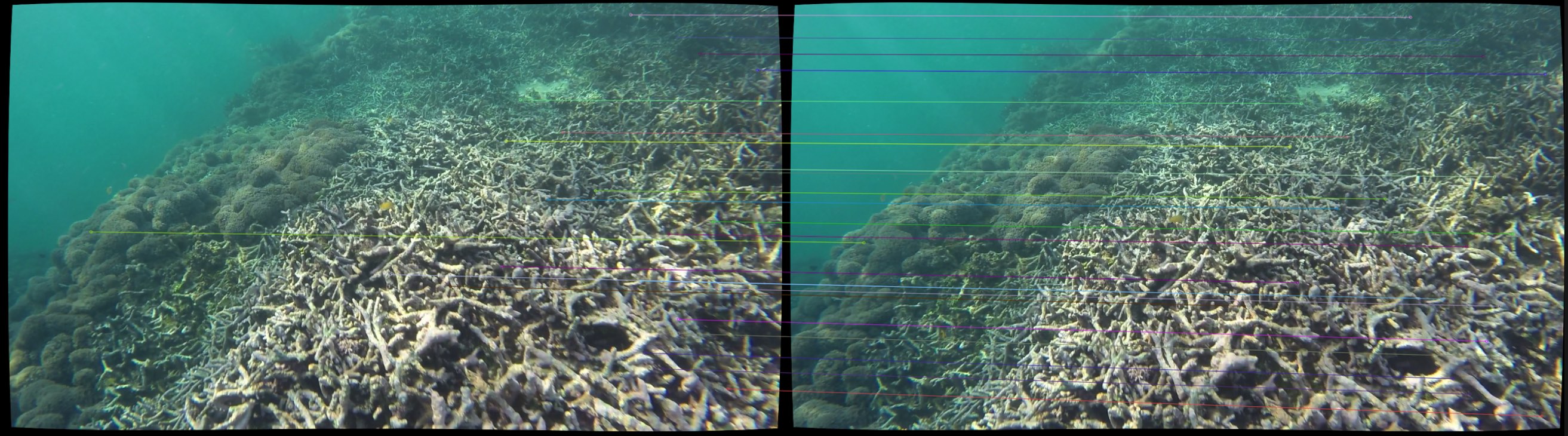 | J Zhang, V Ila, and L Kneip. Robust visual odometry in underwater environment. In OCEANS’18
MTS/IEEE Kobe, Kobe, Japan, May 2018 [pdf] |
 | D Campbell, L Petersson, L Kneip, and H Li. Globally-Optimal Inlier Set Maximisation for
Simultaneous Camera Pose and Feature Correspondence. In Proceedings of the International
Conference on Computer Vision (ICCV), Venice, Italy, October 2017. Oral presentation, Marr Prize
(honourable mention) [pdf(arxiv)] [video] |
 | M Ramezani, K Koshelham, and L Kneip. Omnidirectional Visual-Inertial Odometry Using
Multi-State Constraint Kalman Filter. In Proceedings of the IEEE/RSJ Conference on Intelligent
Robots and Systems (IROS), Vancover, Canada, September 2017 [pdf] |
 | Z Wang and L Kneip. Towards Space Carving with a Hand-held Camera. In Proceedings of the
International Conference on Computer Vision Systems, Shenzhen, July 2017b |
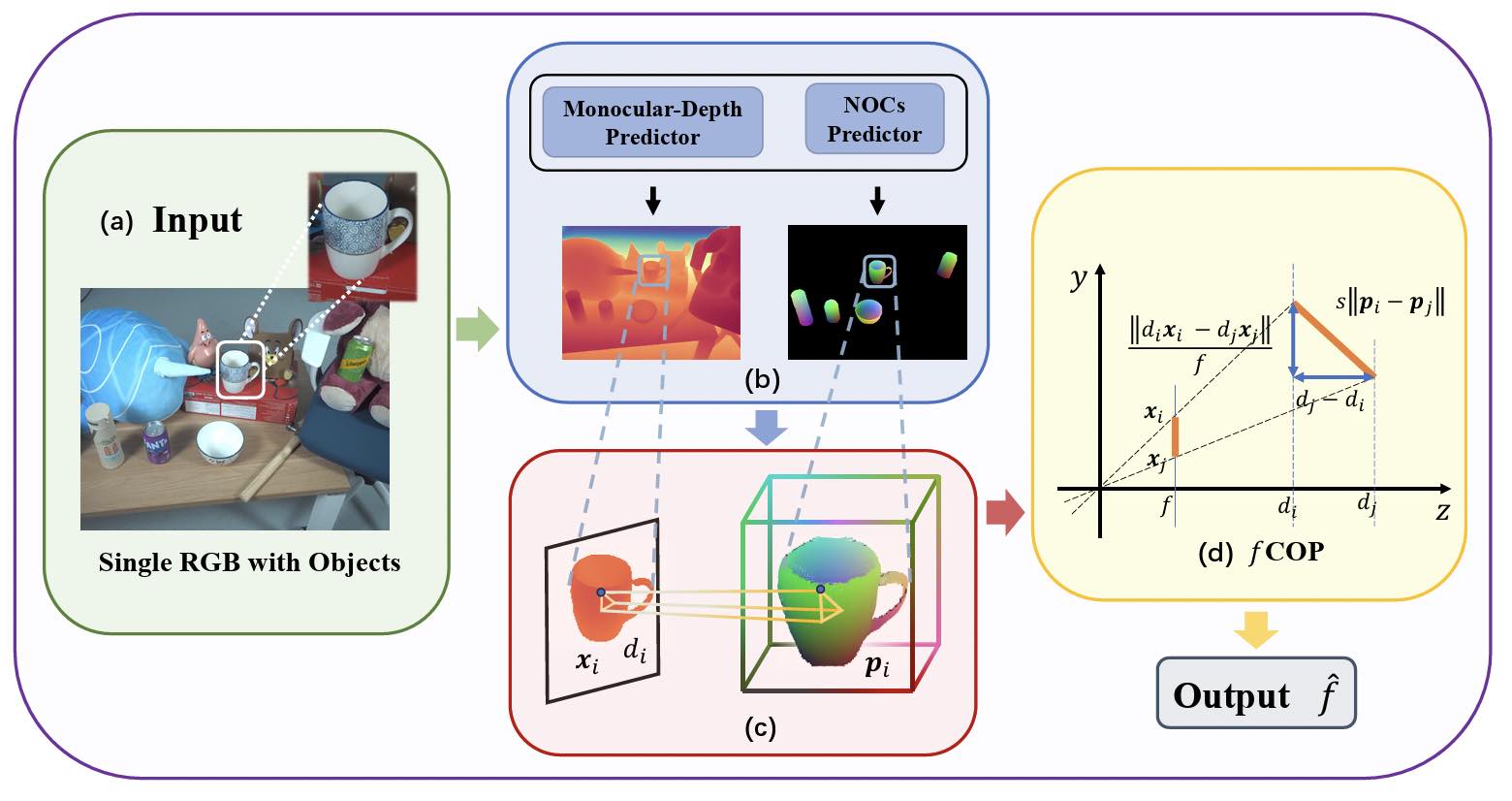 | X Zhang, J Yang, X Meng, A Mohamed, and L Kneip. fcop: Focal length estimation from
category-level object priors. ArXiv e-prints, 2024b [pdf] |
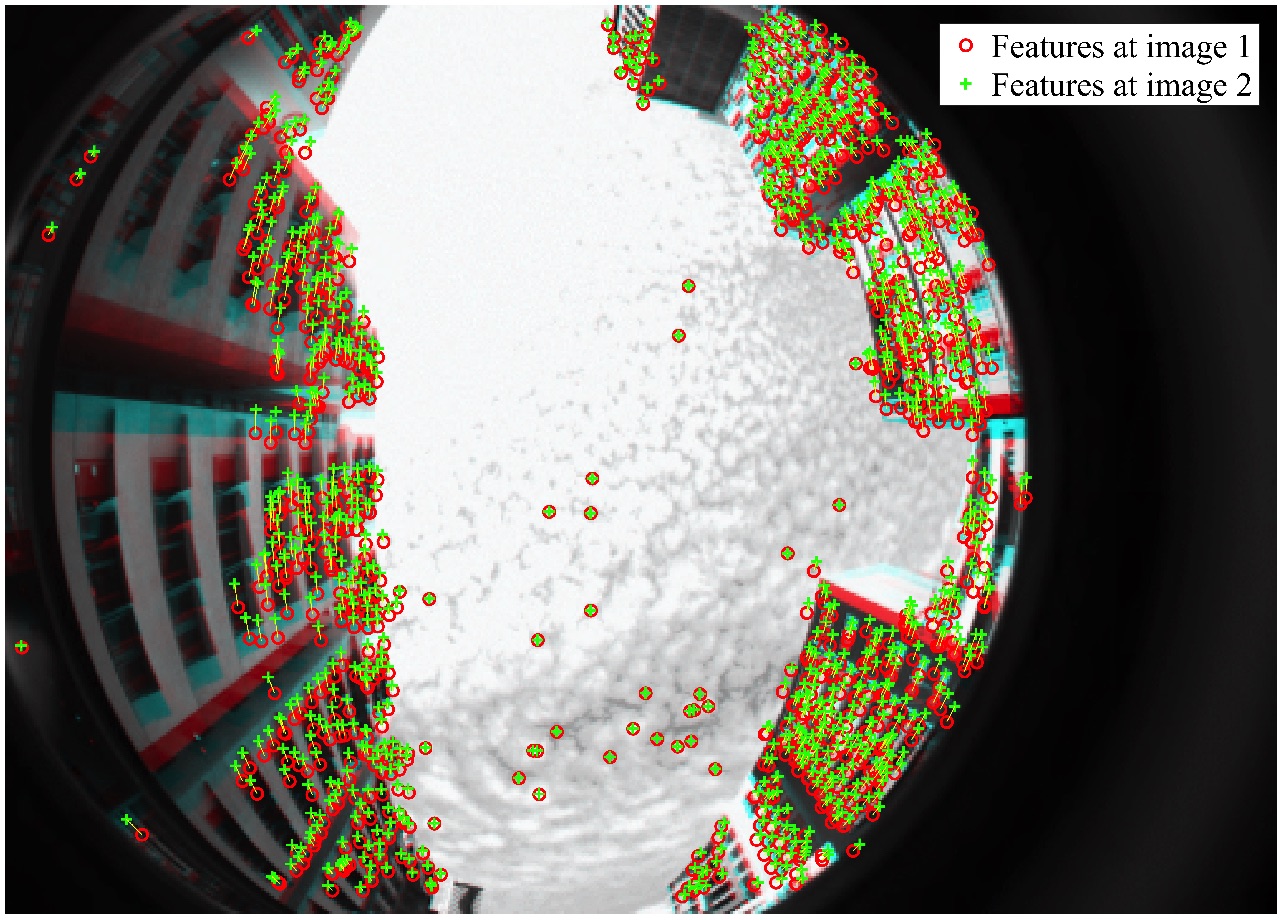
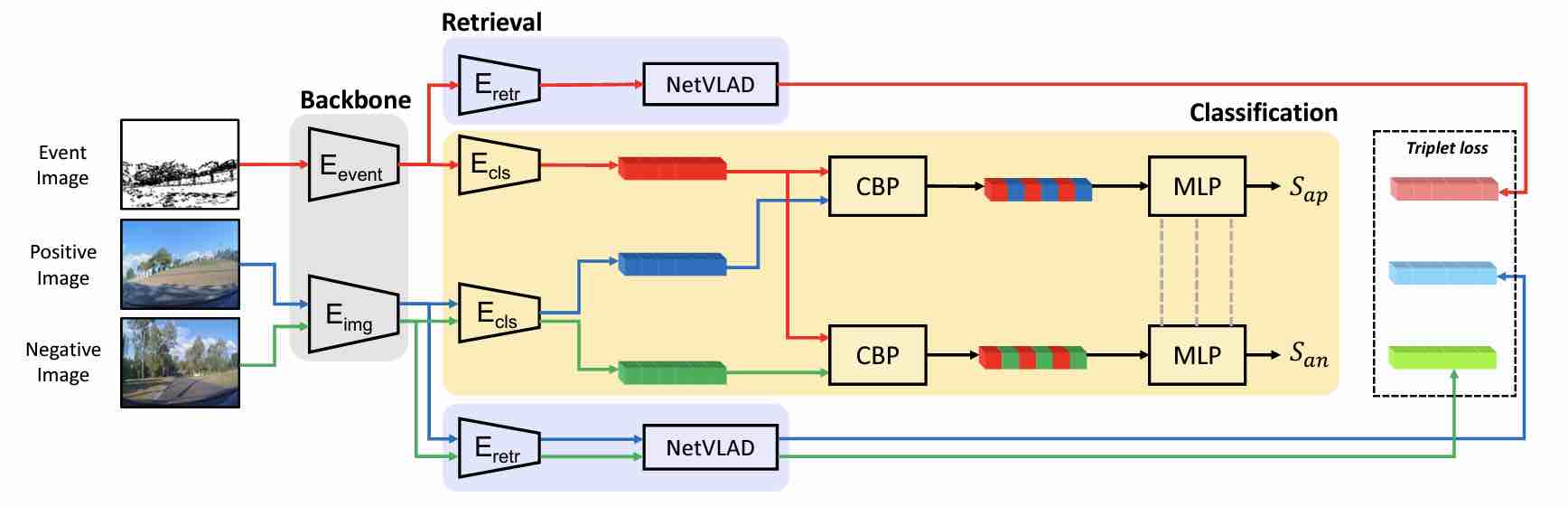 | X Ji, J Wei, Y Wang, H Shang, and L Kneip. Cross-modal place recognition in image databases
using event-based sensors. ArXiv e-prints, 2023 [pdf] |
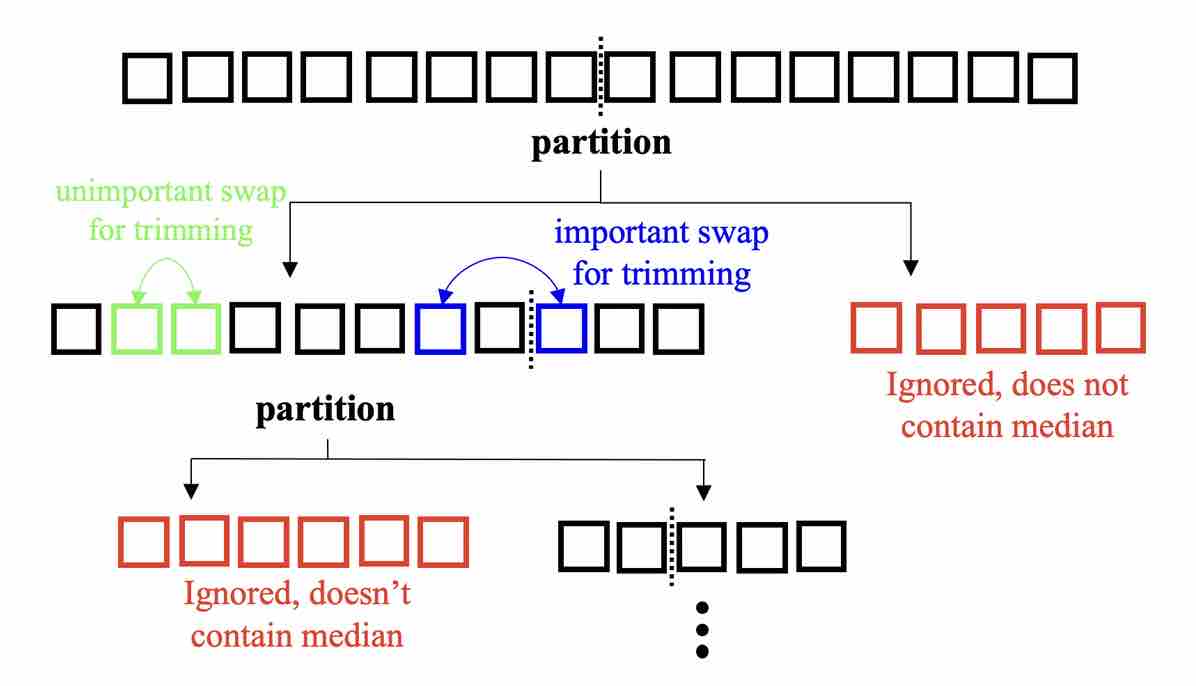 | M Li and L Kneip. Fast geometric trim fitting using partial incremental sorting and accumulation.
ArXiv e-prints, 2022 [pdf] |
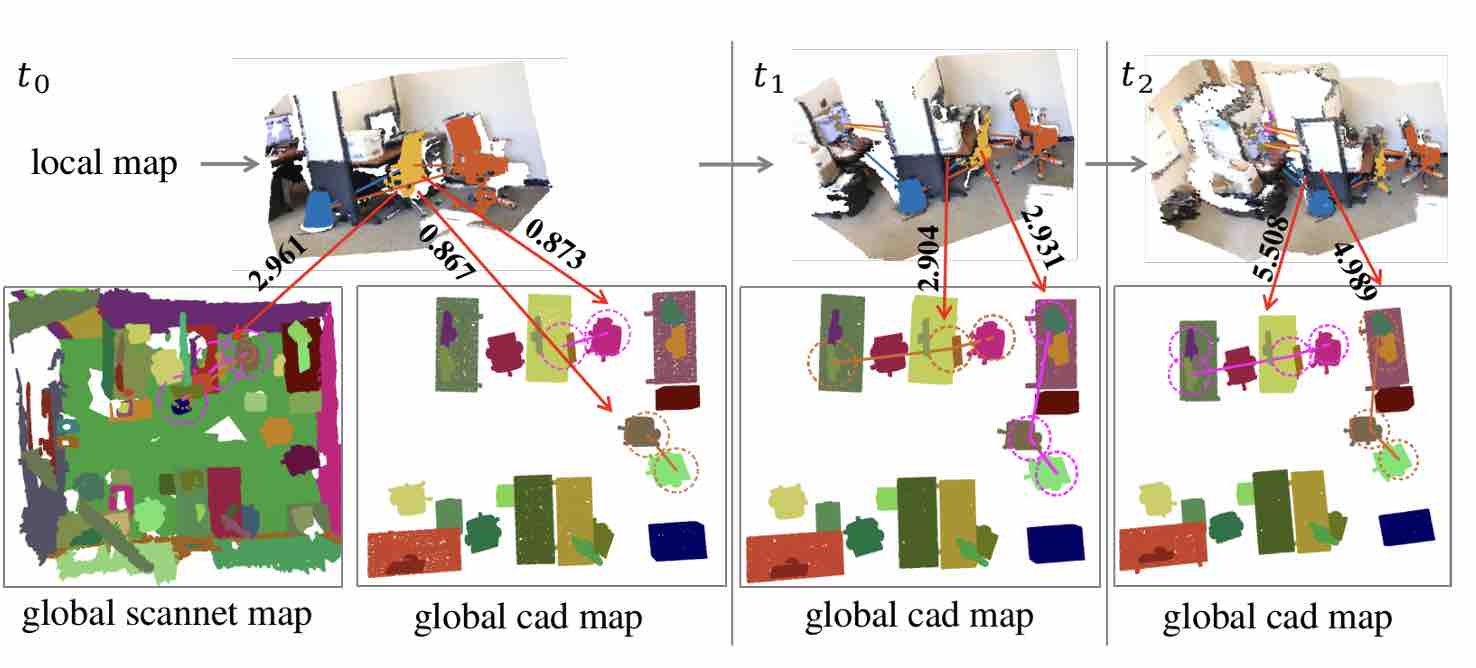 | L Hu, Z Luo, R Yuan, Y Cao, J Wei, K Wang, and L Kneip. Incremental semantic localization
using hierarchical clustering of object association sets. ArXiv e-prints, 2022 [pdf] |
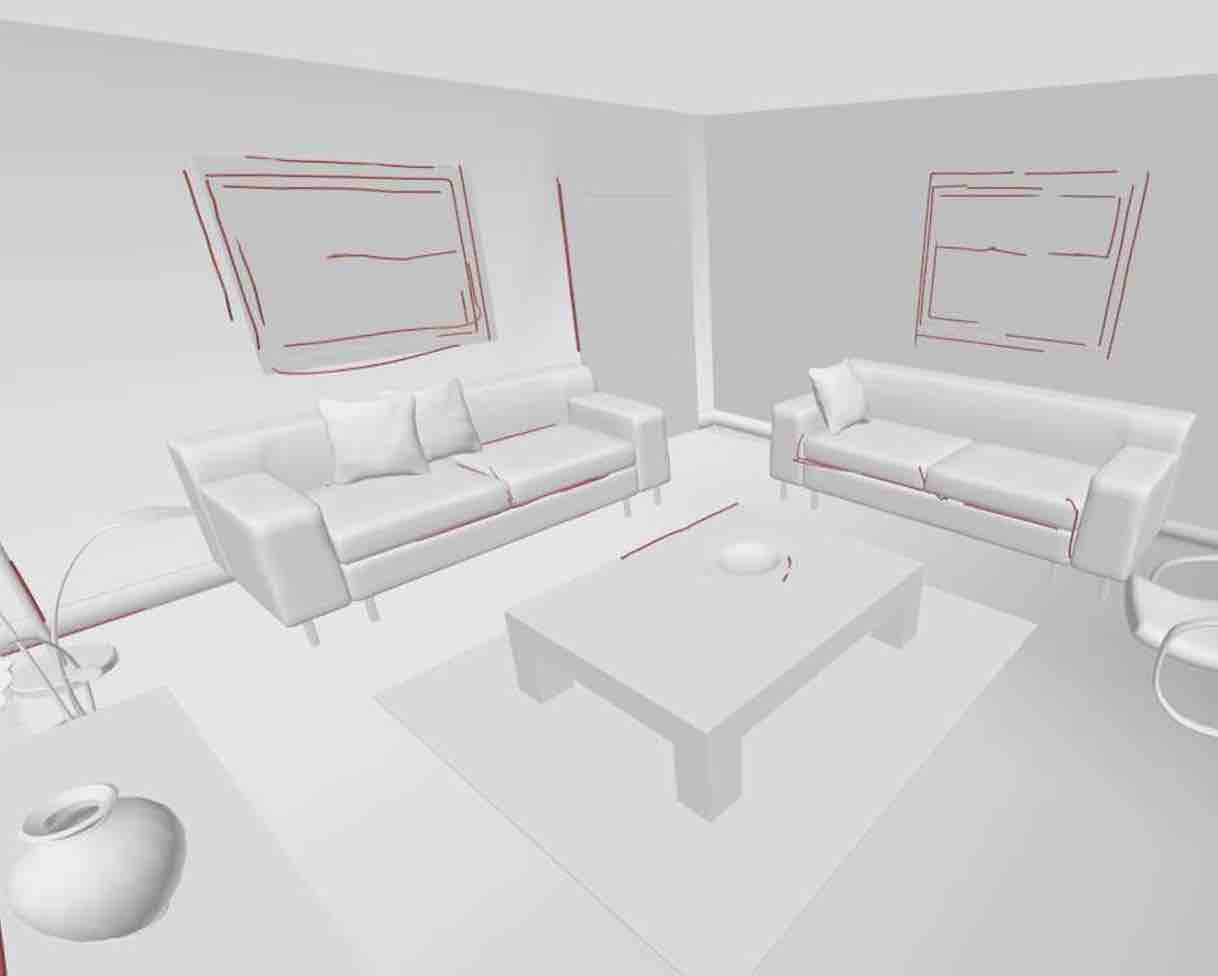
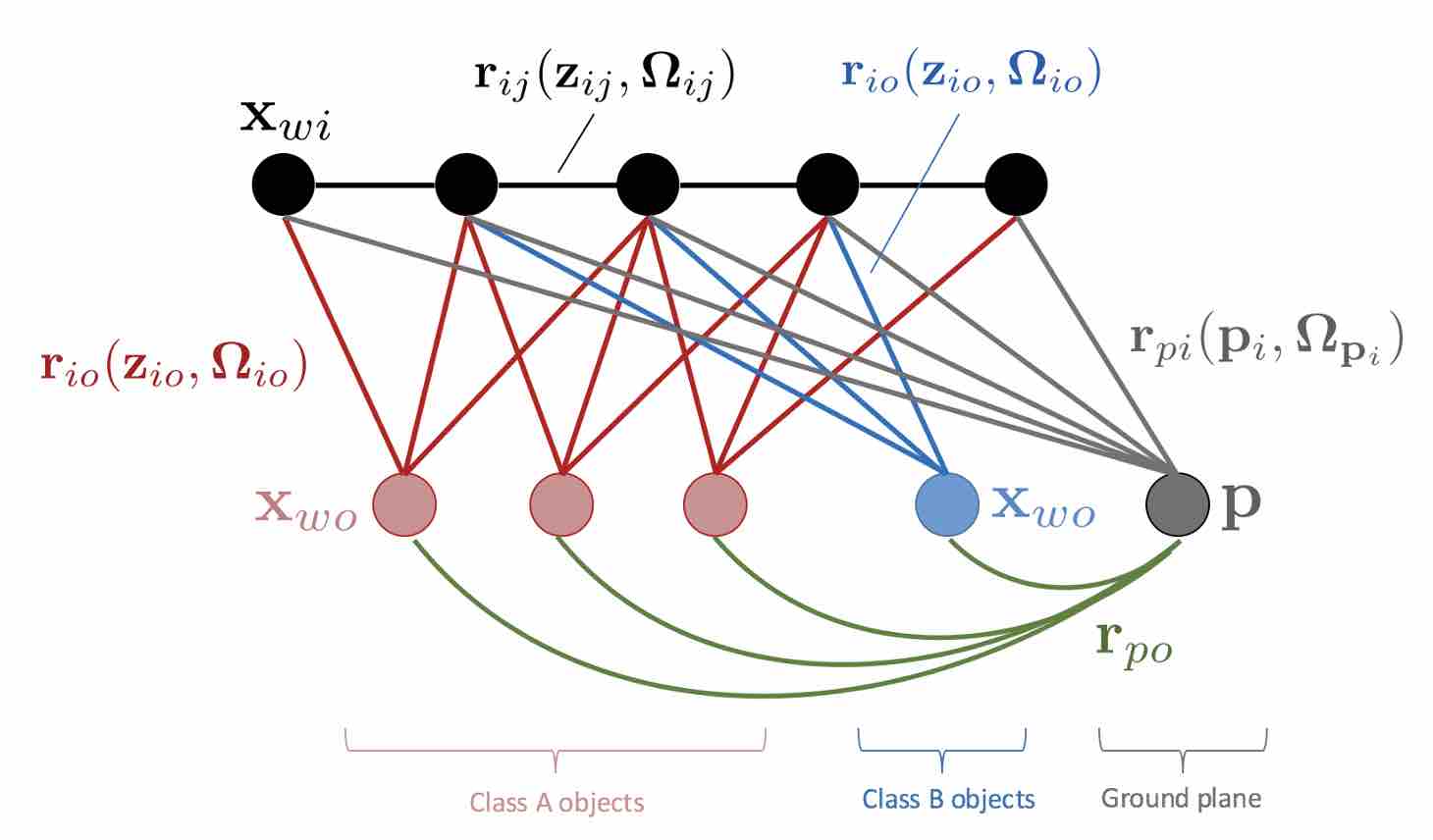 | L Hu, W Xu, K Huang, and L Kneip. Deep-SLAM++: object-level RGBD SLAM based on
class-specific deep shape priors. ArXiv e-prints, 2019 [pdf] |
 | Z Wang and L Kneip. Fully automatic structure from motion with a spline-based environment
representation. ArXiv e-prints, 2018 [pdf] |
| D Scaramuzza, M C Achtelik, L Doitsidis, F Fraundorfer, E B Kosmatopoulos, A Martinelli, M W Achtelik, M Chli, S A
Chatzichristofis, L Kneip, D Gurdan, L Heng, G H Lee, S Lynen, L Meier, M Pollefeys, A Renzaglia, R Siegwart, J C Stumpf,
P Tanskanen, C Troiani, and S Weiss. Vision-controlled micro flying robots: from system design to autonomous navigation and
mapping in GPS-denied environments. IEEE Robotics and Automation Magazine, 21(3):26–40, 2014 [pdf] |
| S Weiss, M Achtelik, L Kneip, D Scaramuzza, and R Siegwart. Intuitive 3d maps for mav terrain exploration and obstacle avoidance.
Journal of Intelligent Robotics Systems, 61(1–4):473–493, 2011 [pdf] |
| Y Zheng and L Kneip. A direct least-squares solution to the PnP problem with unknown focal length. In Proceedings of the IEEE
Conference on Computer Vision and Pattern Recognition (CVPR), Las Vegas, USA, June 2016 [pdf] |
| Y Zhou, L Kneip, and H Li. A revisit of methods for determining the fundamental matrix with planes. In Proceedings of the Digital
Image Computing on Techniques and Applications (DICTA), Adelaide, Australia, November 2015 [pdf] |
| L Kneip, Y Zhou, and H Li. SDICP: Semi-dense tracking based on iterative closest points. In Proceedings of the British Machine
Vision Conference (BMVC), Swansea, UK, August 2015 [pdf] |
| C Sweeney, L Kneip, T Höllerer, and M Turk. Computing similarity transformations from only image correspondences. In
Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Boston, USA, June 2015 [pdf] |
| G Long, L Kneip, X Li, X Zhang, and Q Yu. Simplified mirror-based camera pose computation via rotation averaging. In Proceedings
of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Boston, USA, June 2015 [pdf] |
| L Kneip and H Li. Efficient computation of relative pose for multi-camera systems. In Proceedings of the IEEE Conference on
Computer Vision and Pattern Recognition (CVPR), Columbus, USA, June 2014 [pdf] |
| L Kneip and S Lynen. Direct optimization of frame-to-frame rotation. In Proceedings of the International Conference on Computer
Vision (ICCV), Sydney, Australia, December 2013 [pdf] [supplementary] |
| C Forster, S Lynen, L Kneip, and D Scaramuzza. Collaborative monocular SLAM with multiple micro aerial vehicles. In Proceedings
of the IEEE/RSJ Conference on Intelligent Robots and Systems (IROS), Tokyo, Japan, November 2013 [video] |
| L Oth, P T Furgale, L Kneip, and R Siegwart. Rolling shutter camera calibration. In Proceedings of the IEEE Conference on
Computer Vision and Pattern Recognition (CVPR), Portland, USA, June 2013 [pdf] |
| L Kneip, P Furgale, and R Siegwart. Using multi-camera systems in robotics: efficient solutions to the NPnP problem. In Proceedings
of the IEEE International Conference on Robotics and Automation (ICRA), Karlsruhe, Germany, May 2013. Best computer vision
paper finalist [pdf] |
| M Achtelik, M Achtelik, Y Brunet, M Chli, S Chatzichristofis, J Decotignie, K Doth, F Fraundorfer, L Kneip, D Gurdan,
L Heng, E Kosmatopoulos, L Doitsidis, G Lee, S Lynen, A Martinelli, L Meier, M Pollefeys, D Piguet, A Renzaglia,
D Scaramuzza, R Siegwart, J Stumpf, P Tanskanen, C Troiani, and S Weiss. sFly: swarm of micro flying robots. In Proceedings of
the IEEE/RSJ Conference on Intelligent Robots and Systems (IROS), Vila Moura, Portugal, October 2012a. Best video paper finalist
[video] |
| L Kneip, R Siegwart, and M Pollefeys. Finding the exact rotation between two images independently of the translation. In
Proceedings of the European Conference on Computer Vision (ECCV), Firenze, Italy, October 2012 [pdf] |
| A Breitenmoser, L Kneip, and R Siegwart. A monocular vision-based system for 6D relative robot localization. In Proceedings of
the IEEE/RSJ Conference on Intelligent Robots and Systems (IROS), San Francisco, USA, September 2011 [pdf] |
| R Voigt, J Nikolic, C Hürzeler, S Weiss, L Kneip, and R Siegwart. Robust embedded egomotion estimation. In Proceedings of the
IEEE/RSJ Conference on Intelligent Robots and Systems (IROS), San Francisco, USA, September 2011 [pdf] |
| L Kneip, A Martinelli, S Weiss, D Scaramuzza, and R Siegwart. Closed-form solution for absolute scale velocity determination
combining inertial measurements and a single feature correspondence. In Proceedings of the IEEE International Conference on Robotics
and Automation (ICRA), Shanghai, China, May 2011b [pdf] |
| L Kneip, D Scaramuzza, and R Siegwart. On the initialization of statistical optimum filters with application to motion estimation.
In Proceedings of the IEEE/RSJ Conference on Intelligent Robots and Systems (IROS), Taipei, Taiwan, October 2010 [pdf] |
| L Kneip, F Tache, G Caprari, and R Siegwart. Characterization of the compact hokuyo URG-04LX 2D laser range scanner. In
Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), Kobe, Japan, May 2009 [pdf] |
| L Kneip. Real-Time Scalable Structure from Motion: From Fundamental Geometric Vision to Collaborative Mapping. PhD thesis,
ETH Zurich, 2012. ETH Dissertation No. 20628 [pdf] |